in HIS-LSF
| Course Type | Basic Laboratory (AML) |
| Level | Basic Studies/ Bachelor |
| Semester | Winter Semester/ Summer Semester |
| Creditpoints | 2 CP |
| Language | English |
Course Description
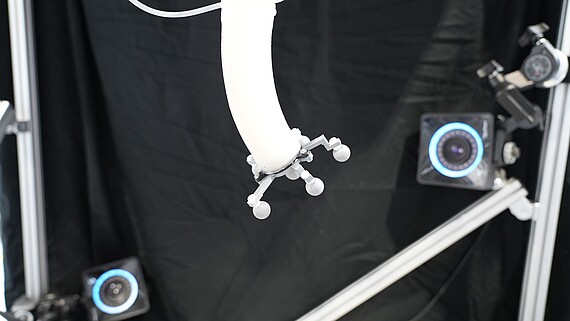
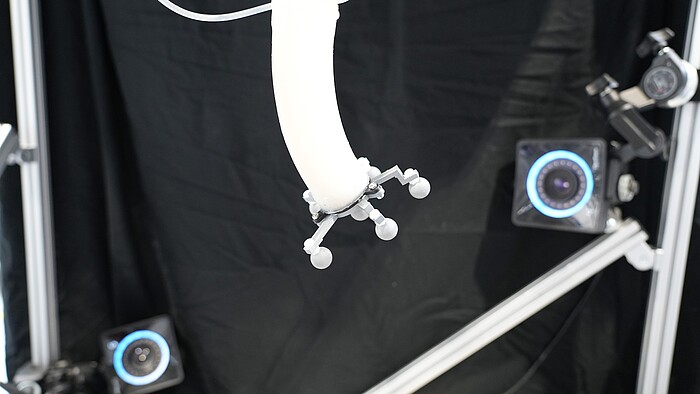
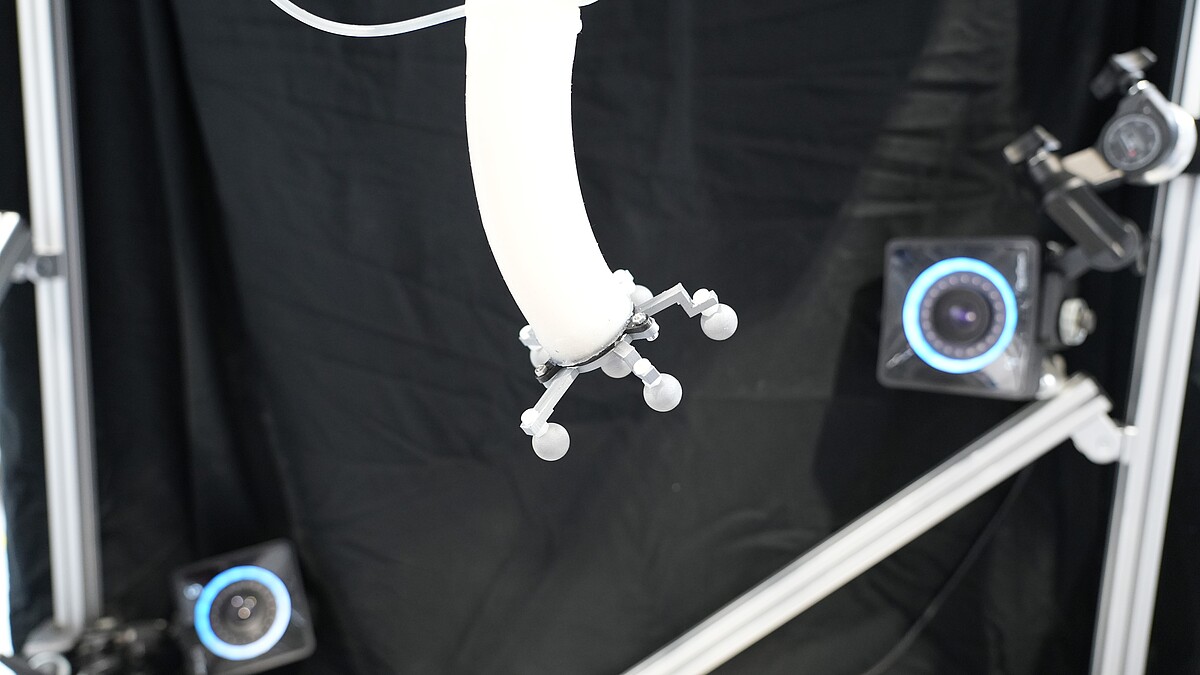
This laboratory explores the principles of soft robotics, emphasizing their application as innovative solutions to robotic challenges that demand flexibility, adaptability, and/or safe interaction with complex environments.
Students will dig in the design and functionality of soft pneumatic robots together with the understanding on motion tracking systems and its implementation process to gather motion information from objects.
In the experimental session, students will focus on using motion tracking technologies (OptiTrack). They will gain hands-on experience on the setup, calibration, data evaluation, and visualization processes when using these systems.
By the end of the course, students will be adept at using motion tracking to assess the performance of soft robotic systems.
Module Content
-
Soft robotics principles
-
Motion tracking systems principles
-
OptiTrack system calibration using motive software
-
Matlab script familiarization
Learning Objectives
By the end of this course, you will be able to:
-
Define applications and challenges of soft robotics
-
Identify key properties of soft pneumatic actuators
-
Understand optical tracking with multiview stereovision
-
Calibrate OptiTrack systems
-
Evaluate soft pneumatic actuators
Please note that activating the video will result in the transfer of data to the respective provider. Further information can be found in our privacy policy.
Play video
Exam Information and Registration
Your Contact and Superivsor


M. Sc. Ditzia Susana García Morales
Research Staff
Mobile
Address
An der Universität 2
30823 Garbsen
30823 Garbsen
Building
Room
M. Sc. Ditzia Susana García Morales
Research Staff
Mobile
Your Professor


Prof. Dr.-Ing. Annika Raatz
Professors
Phone
Address
An der Universität 2
30823 Garbsen
30823 Garbsen
Building
Room
Prof. Dr.-Ing. Annika Raatz
Professors



















