im HIS-LSF
| Art der Veranstaltung | Kleine Laborarbeit (AML) |
| Niveaustufe | Grundstudium / Bachelor |
| Semester | Wintersemester/ Sommersemester |
| Creditpoints | 2 CP |
| Sprache | Englisch |
Kursbeschreibung
In diesem Labor werden die Prinzipien der Soft Robotics behandelt, wobei der Schwerpunkt auf innovativen Lösungen für robotische Herausforderungen liegt, die Flexibilität, Anpassungsfähigkeit und/oder sichere Interaktion mit komplexen Umgebungen erfordern.
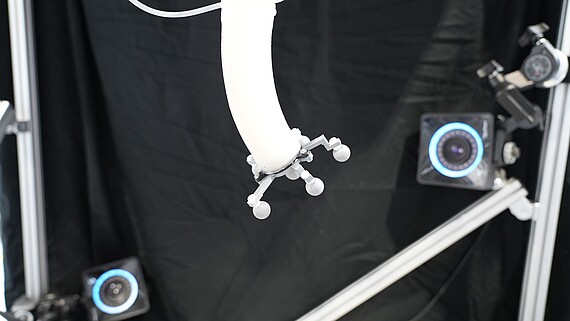
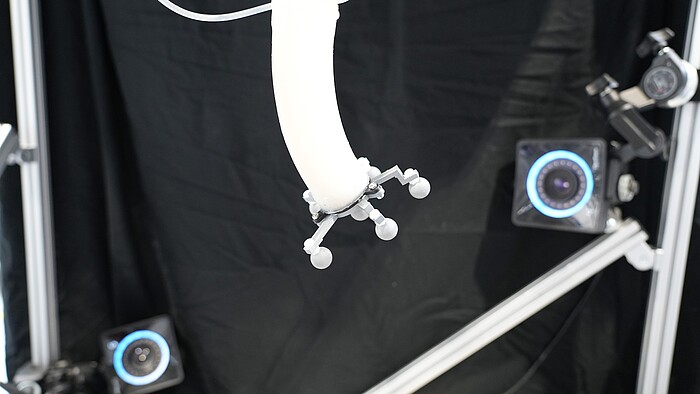
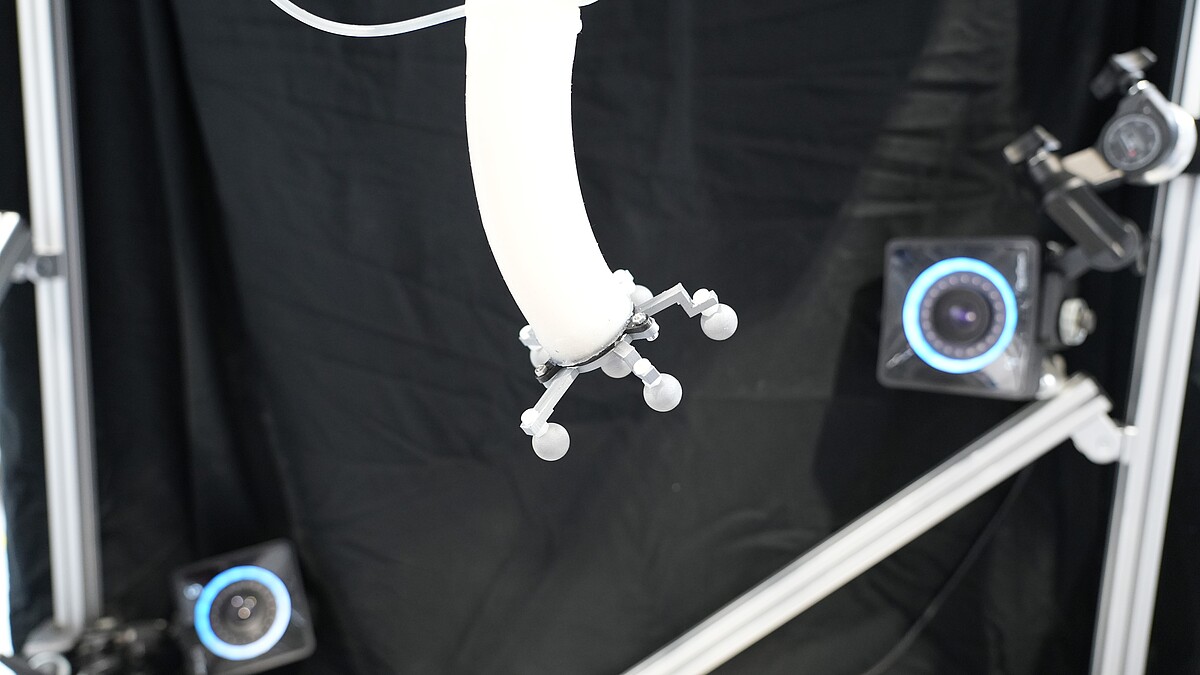
Die Studierenden befassen sich mit dem Design und der Funktionalität von weichen pneumatischen Robotern. Gleichzeitig lernen sie Motion-Tracking-Systeme und deren Implementierungsprozess kennen, um Bewegungsdaten von Objekten zu sammeln.
In einer experimentellen Einheit wenden die Studierenden Motion-Tracking Technologie anhand eines OptiTrack-Systems an. Sie werden praktische Erfahrungen mit dem Einrichten, der Kalibrierung, der Datenauswertung und der Visualisierung bei der Verwendung dieser Systeme sammeln.
Am Ende des Kurses werden die Studierenden in der Lage sein, die Leistung von Soft Robotics Systemen mit Hilfe von Motion-Tracking zu bewerten.
Modulinhalt
- Grundlagen der Soft Robotics
- Prinzipien von Motion-Tracking-Systemen
- Kalibrierung eines OptiTrack-Systems mit Hilfe der Software Motive
- Einführung in Matlab-Skripte
Lernziele
Am Ende dieses Kurses werden Sie in der Lage sein:
- Anwendungen und Herausforderungen der Soft Robotics zu definieren
- die wichtigsten Eigenschaften soft pneumatischer Aktoren zu benennen
- Optisches Tracking mit Multiview-Stereovision zu verstehen
- OptiTrack-Systeme zu kalibrieren
- soft pneumatische Aktoren zu evaluieren
Hinweis: Nach der Aktivierung des Videos werden Daten an den jeweiligen Anbieter übermittelt. Weitere Informationen finden Sie in unserer Datenschutzerklärung.
Video abspielen
Prüfungsinformationen und Prüfungsanmeldung
Ihr Betreuer und Ansprechpartner


M. Sc. Ditzia Susana García Morales
Wissenschaftliche Mitarbeiterinnen und Mitarbeiter
Mobil
E-Mail
Adresse
An der Universität 2
30823 Garbsen
30823 Garbsen
Gebäude
Raum
M. Sc. Ditzia Susana García Morales
Wissenschaftliche Mitarbeiterinnen und Mitarbeiter
Mobil
E-Mail
Ihre Professorin


Prof. Dr.-Ing. Annika Raatz
Professorinnen und Professoren
Telefon
E-Mail
Adresse
An der Universität 2
30823 Garbsen
30823 Garbsen
Gebäude
Raum
Prof. Dr.-Ing. Annika Raatz
Professorinnen und Professoren



















