im HIS-LSF
| Art der Veranstaltung | Vorlesung + Übung |
| Niveaustufe | Bachelor / Master |
| Semester | Sommersemester/ Wintersemester |
| Creditpoints | 5 CP |
Ziel der Lehrveranstaltung
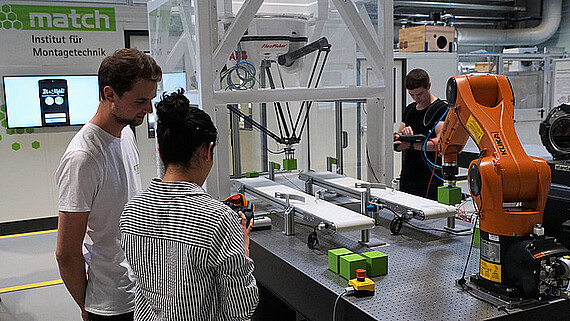
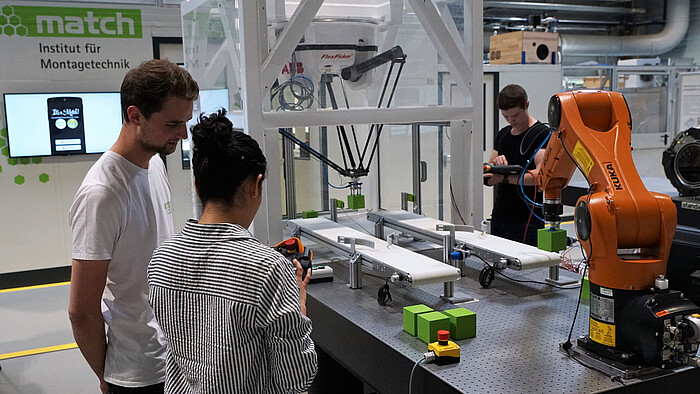
Die Veranstaltung vermittelt den Studierenden die theoretischen und praktischen Grundlagen zur Umsetzung einer robotergestützten Montage am Beispiel einer realitätsnahen Problemstellung. Ausgangspunkt der Vorlesung ist die Vorgabe einer Montageaufgabe, anhand derer die Studierenden in längeren Praxiseinheiten Lösungsansätze zur Realisierung des automatisierten Montageprozesses selbstständig ableiten. Hierbei stehen die Teilaspekte Simulation, Sensorintegration und Programmierung im Vordergrund.
Inhalt der Lehrveranstaltung
- Roboterprogrammierung
- Aufzeigen von verschiedenen Programmierarten
- Vorstellung der Speicherprogrammierbaren Steuerung
- Simulation von Montageprozessen
- Aufbau einer Montagezelle
- Simulationsprogramm: KUKA SimPro
- Sensorintegration in einer Montagezelle
- Sensortechnologien in der Robotik
- Einbindung von Sensoren in einer Montagezelle
- Aufbau einer realen Montagezelle
- Vorgabe einer Problemstellung
- Ausarbeitung in Teams
Info: Die Vorlesung wird in deutscher Sprache gehalten.
Prüfungsinformationen und Prüfungsanmeldung
Ihre Professorin


Prof. Dr.-Ing. Annika Raatz
Professorinnen und Professoren
Telefon
E-Mail
Adresse
An der Universität 2
30823 Garbsen
30823 Garbsen
Gebäude
Raum
Prof. Dr.-Ing. Annika Raatz
Professorinnen und Professoren



















