


Roboter
-
KUKA KR 6 R900 sixx
![]()
![]()
![]()
Im Institut sind mehrere Roboter dieses Typs mit einer Traglast von 6 kg vorhanden, die auch gerne in der Lehre eingesetzt werden.
Traglast 6 kg Reichweite 1.611 mm Wiederholgenauigkeit 30 µm -
KUKA KR60-3
Der Industrieroboter von Kuka hat eine Traglast von 60 kg und kann mit unterschiedlichen Greifsystemen flexible an variierende Handhabungsaufgaben mit mittleren Traglasten angepasst werden.
Steuerung KRC4 Traglast 60 kg Wiederholgenauigkeit 60 µm -
Kuka LBR iiwa 14 R820
![]()
![]()
![]()
Der kollaborationsfähige Roboter besitzt Drehmomentsensoren in allen sieben Achsen und kann somit für feinfühlige Aufgaben auch in Zusammenarbeit mit dem Menschen eingesetzt werden.
Achsen 7 Traglast 14 kg Wiederholgenauigkeit 150 µm -
Stäubli TX200
![Stäubli TX200 Additive Manufacturing]()
![Stäubli TX200 Additive Manufacturing]()
![Stäubli TX200 Additive Manufacturing]()
Der Stäubli TX-200 ist ein 6-Achs-Industrieroboter mit bis zu 120 kg Traglast und einer Reichweite von 2200 mm. Mit einer maximalen kartesischen Geschwindigkeit von 12 m/s, Greifer-Schnellwechselsystem und Anbindung an eine externe Steuerung der Fa. Beckhoff können insbesondere Automatisierungslösungen für Schwerlastanwendungen erforscht und entwickelt werden. Neben Handhabungsaufgaben ermöglicht der aktuelle Aufbau auch die Untersuchung und Digitalisierung von großskaligen additiven Fertigungsverfahren.
Traglast 100 kg Reichweite 2.194 mm Wiederholgenauigkeit 60 µm Gewicht 1000 kg -
Franka Emika Panda
![Miranda: Panda robot arm on top of MiR100 platform]()
![Miranda: Panda robot arm on top of MiR100 platform]()
![Miranda: Panda robot arm on top of MiR100 platform]()
Der Franka Emika Panda ist ein kollaborativer Roboter, der mit seiner 7-Achsen-Flexibilität Redundanz bietet und so komplexe Manipulationen durchführen kann. Ausgestattet mit Drehmomentsensoren in allen Achsen, bietet der Panda eine außergewöhnliche Sensibilität, die eine sichere und effiziente Mensch-Roboter-Interaktion ermöglicht. Dieser Roboter ist außerdem benutzerfreundlich und unterstützt eine Reihe von Programmierumgebungen, was ihn ideal für Ausbildungszwecke, Forschung und kleinere Montageaufgaben macht.
Achsen 7 Traglast 3 kg Reichweite 855 mm Wiederholgenauigkeit 100 µm -
ABB Flex Picker IRB360
![ABB Flexpicker am match]()
![ABB Flexpicker am match]()
![ABB Flexpicker am match]()
Der IRB 360 ist ein 4-Achs-Hochleistungs-Industrieroboter von ABB-Robotics. Er baut modular auf der IRB-Roboterfamilie auf und wurde speziell für Industriezweige entwickelt, die einen hohen Bedarf an flexibler Automatisierung haben. Der IRB 360 ist extrem leistungsfähig mit einer Beschleunigung von bis zu 10g und einer Traglast von bis zu 8 kg. Dies ermöglicht in Pick-and-Place Anwendungen, je nach Zyklus und Ladung eine Aufnahme von bis zu 200 Teilen pro Minute. Im aktuellen Institutseinsatz erfolgt an diesem System die Einführung von Studierenden in die industrielle Roboterprogrammierung.
Traglast 1 kg Arbeitsraum 1130·250 mm² Wiederholgenauigkeit 50 µm Beschleunigung 10 g













Autonome Mobile Plattformen
-
MiR 100
![Miranda: MiR100 platform with panda robot on top]()
![Miranda: MiR100 platform with panda robot on top]()
![Miranda: MiR100 platform with panda robot on top]()
Dies ist ein mobiler Roboter des Unternehmens „Mobile Industrial Robots A/S“. Grundlegend wird diese mobile Plattform für den Warentransport und die Materialbereitstellung verwendet. Der mobile Roboter dient uns am Institut als Basis für die Forschung im Bereich „Kooperativer Objekttransport“.
Abmaße 890 mm x 580 mm x 352 mm Gewicht 67 kg Max. Payload 100 kg Max. Geschwindigkeit 1,5 m/s Reichweite/Akkulaufzeit 20 km oder 10 h -
MiR 200
Dies ist ein mobiler Roboter des Unternehmens „Mobile Industrial Robots A/S“. Grundlegend wird diese mobile Plattform für den Warentransport und die Materialbereitstellung verwendet. Der mobile Roboter dient uns am Institut als Basis für die Forschung im Bereich „Kooperativer Objekttransport“.
Abmaße 890 mm x 580 mm x 352 mm Gewicht 70 kg Max. Payload 200 kg Max. Geschwindigkeit 1,1 m/s Reichweite/Akkulaufzeit 15 km oder 10 h -
MiR 600
![]()
![]()
![]()
Dies ist ein mobiler Roboter des Unternehmens „Mobile Industrial Robots A/S“. Grundlegend wird diese mobile Plattform für den Warentransport und die Materialbereitstellung verwendet. Der mobile Roboter dient uns am Institut als Basis für die Forschung im Bereich „Kooperativer Objekttransport“.
Abmaße 1350 mm x 910 mm x 322 mm Gewicht 229 kg Max. Payload 600 kg Max. Geschwindigkeit 2 m/s Akkulaufzeit 10 h -
SPOT (Emma)
![]()
![]()
![]()
Dies ist ein mobiler Roboter des Unternehmens „Boston Dynamics“. Dieser mobile Roboter besitzt aufgrund seiner vier Beine ein besonderes Antriebskonzept, welches ihm die Bewegung in unebenen Gelände ermöglicht. Aufgrund dessen eignet sich dieser Roboter ideal für Inspektions- oder Explorationsaufgaben. In einer fakultätsweiten Abstimmung unter den Studierenden wurde dem SPOT der Name Emma gegeben.
Abmaße 1100 mm x 500 mm x 191 mm Gewicht 32,7 kg Max. Payload 14 kg Max. Geschwindigkeit 1,6 m/s Akkulaufzeit 1,5h -
Scout Mini
Dies ist ein mobiler Roboter des Unternehmens „Agilex Robotics“. Die Besonderheit an dieser mobilen Roboterplattform ist die holonome Bewegungsfreiheit aufgrund der speziellen Räder, wodurch eine Bewegung in jegliche Richtung ermöglicht wird.
Abmaße 627 mm x 550 mm x 252 mm Gewicht 20 kg Max. Payload 10 kg Max. Geschwindigkeit 2,7 m/s -
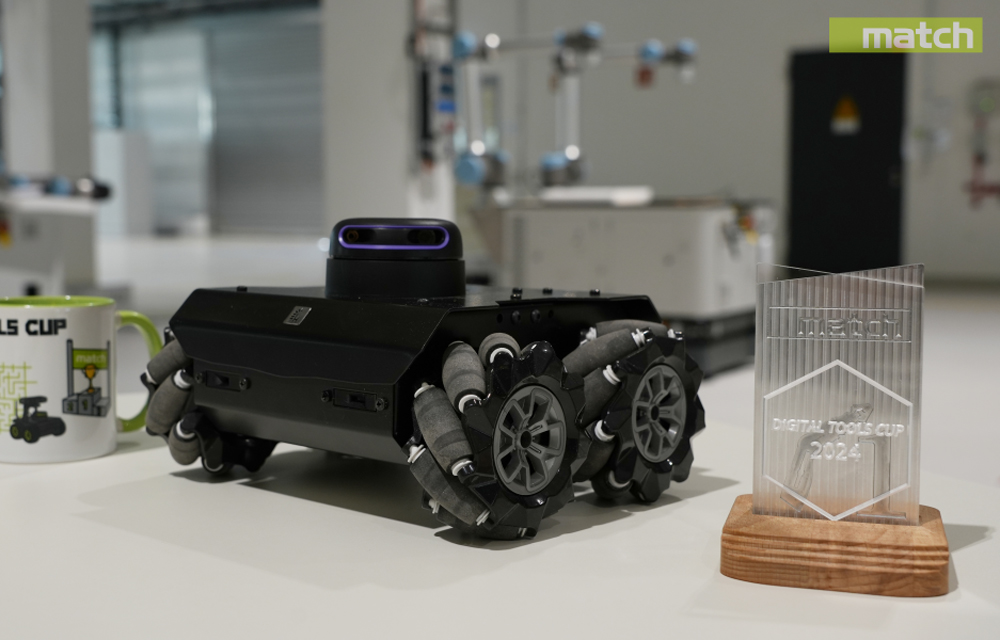
ROSBot 2 PRO
![ROSBot 2 Pro: holonomer Roboter beim Digital Tools Cup]()
![ROSBot 2 Pro: holonomer Roboter beim Digital Tools Cup]()
![ROSBot 2 Pro: holonomer Roboter beim Digital Tools Cup]()
Dies ist ein mobiler Roboter des Unternehmens „Husarion“. Die Besonderheit an dieser mobilen Roboterplattform ist die holonome Bewegungsfreiheit aufgrund der speziellen Räder, wodurch eine Bewegung in jegliche Richtung ermöglicht wird. Dieser mobile Roboter wird den Studierenden der Lehrveranstaltung „Digital Tools“ in den Studiengängen „Maschinenbau“ und „Produktion und Logistik“ für ein Labor zur Verfügung gestellt.
Abmaße 200 mm x 235 mm x 220 mm Gewicht 2,84 kg Max. Payload 5 kg Max. Geschwindigkeit 0,9 m/s Akkulaufzeit 1,5h - 5h







Mess- und Prüfeinrichtungen
-
Zugprüfmaschine - zwickiLine 500 N (Zwick/Roell)
Die zwickiLine von ZwickRoell ist eine einfach zu bedienende Prüfmaschine, die sich in der vorliegenden Ausstattung ideal für schnelle Zug- und Druckversuche mit Prüfkapazitäten von bis zu 500 Newton eignet.
Mit der intuitiven Prüfsoftware TestXpert ermöglicht die zwickiLine eine schnelle Einarbeitung und umfassende Datenerfassung, sowie die automatische Berechnung von Materialkennwerten. Ihre Modularität erlaubt die Ausstattung mit diversen Zubehörteilen und individuellen Spannvorrichtungen. Gerade für eine Bildungseinrichtungen dient sie zudem zur praxisnahen Einführung in die Materialprüfung.
-
Zugprüfmaschine rycobel RL-DCT-10-A
![]()
![]()
![]()
Die RL-DCT-10-A kann sowohl Zug- als auch Druckprüfungen durchführen. Aufgrund ihrer verkürzten Ausführung, kann die Zugprüfmaschine in der Handschuhbox betrieben werden, was eine Veränderung der Prozessatmosphäre (auch sauerstofffrei) ermöglicht.
Absolute Höhe 850 mm Maximale Verfahrweite 400 mm Max. Zugkraft 10 kN Prüfgeschwindigkeiten Zwischen 0,2 und 800 mm/min. Messgenauigkeit Kraftmessungen mit einer Auflösung von 0,002 % der Nennlast und Dehnungsmessungen mit einer Auflösung von 0,01 mm -
Kontaktwinkelmessgerät DataPhysics OCA 50EC
Bei dem Kontaktwinkelmessgerät OCA 50EC handelt es sich um ein videogestütztes optisches Kontaktwinkelmessgerät für die softwaregesteuerte, automatische Messung und Auswertung des statischen und dynamischen Kontaktwinkels. Es dient der automatischen Bestimmung des Benetzungsverhaltens an Festkörperoberflächen, der freien Oberflächenenergie von Festkörpern und deren Komponenten und zur Berechnung der Oberflächen- und Grenzflächenspannung aus der Tropfenkonturanalyse.
Probentisch
100 x 100 mm²
Max. Probenabmessungen
(LxBxH)220 x unendl. x 70 mm³
Max. Probengewicht
10 kg Elektronische Positionsauflösung
in X-/Y-/Z-Richtung± 39 nm
USB 3 Kamera
1448 x 1066 px / 156 fps
1448 x 60 px / 3246 fpsMessbereich Kontaktwinkel
0...180° ; ±0,1°
Messbereich Oberflächen- und Grenzflächenspannung
0,01 ...2000 mN/m;
±0,01 mN/m Auflösung -
Faro Laser Tracker Vantage
Mit dem FARO Vantage Laser Tracker können Produkte und Systeme einfach und präzise vermessen werden. Dank Portabilität sowie robuster Konstruktion können groß angelegte 3D-Messungen auch extern durchgeführt werden. Staub- und Wasserschutz gemäß IP52 erlauben zudem den Einsatz im Außenbereich. Im aktuellen Institutsalltag erfolgt mit dem System insbesondere die Bestimmung der Wiederholgenauigkeit von mobilen Plattformen und Industrierobotern bei Projektpartnern.
Messbereich bis 35m MPE 0,05 mm -
Keyence RB-1200
![]()
![]()
![]()
Der Keyence RB-1200 ist ein Kamerasystem für die 3-dimensionale Bilderfassung von größeren Feldbereichen. Über hochauflösende Bildsensoren werden mithilfe des Streifenprojektionsverfahren 3-dimensionale Punktewolken von Objekten erzeugt. Digitalisierungen großer Baugruppen und komplexer Geometrien sowie präzise Lage - und Objekterkennungen können damit am Institut realisiert werden.
Arbeitsabstand 2 m Messbereich 1 m x 1,26 m x 1,260 m Wiederholgenauigkeit 0,4 mm -
Qualisys Arqus A12
![Qualisys Arqus Camera]()
![Qualisys Arqus Camera]()
![Qualisys Arqus Camera]() ©
qualisys.com
©
qualisys.com
Das Qualisys Arqus Motion Capture System dient dem hochpräzisen Tracking von Objekten. Beispielsweise ermöglicht dieses System die Aufzeichnung und Evaluierung von Bewegungen von mobilen Robotern
Auflösung 12MP | 300 fps 3D Auflösung 40 µm Max. Reichweite einer Kamera 32m -
Optitrack Flex 3
![]()
![]()
![]() ©
optitrack.com
©
optitrack.com
Die Flex 3 Kamera von OptiTrack ist eine kompakte Motion-Capture-Kamera mit hoher PRäzision in der Objekterkennung. Mit einer Auflösung von 0,3 Megapixeln, einer Bildrate von 100 FPS und einer Latenz von 10 ms bietet sie ±0,50 mm 3D-Genauigkeit. Sie verwendet austauschbare M12-Objektive (3,5 mm und 4,5 mm EFL) und 850 nm IR-Licht für unauffällige Beleuchtung. Die Kamera unterstützt verschiedene Bildverarbeitungsmodi, darunter MJPEG-komprimiertes und unkomprimiertes Graustufenbild. Die Flex 3 ist ideal für modulare Systeme, die mit der Zeit erweitert werden können.
Auflösung 640x480 | 100 fps 3D Auflösung 0,5 mm Max. Reichweite einer Kamera 6 m -
Optitrack Prime17W
OptiTrack ist ein Anbieter von markerbasierten Motion-Capture-Systemen, die präzise Bewegungsverfolgung für Anwendungen in Film, Virtual Reality, Robotik und mehr ermöglichen.
Die OptiTrack Prime17W Kameras zeichnen sich durch ihre hohe Auflösung von 1,7 Megapixeln aus, was präzise Bewegungsverfolgung mit einer Genauigkeit von bis zu unter 0,1 mm ermöglicht. Sie bieten ein breites Sichtfeld von 70 Grad, ideal für umfassende Erfassungsbereiche. Dank einer Bildfrequenz von 360 Hz können sie auch schnelle Bewegungen ohne Verzögerung erfassen. Ihre Infrarot-LEDs sorgen für eine zuverlässige Tracking-Leistung auch bei schwierigen Lichtverhältnissen.
Auflösung 1664 × 1088 | 30–360 fps Genauigkeit 0,1 mm -
Creality CR-Scan Raptor 3D-Scanner
![]()
![]()
![]() ©
creality.com
©
creality.com
Der Raptor ist ein 3D-Scanner mit einem hybriden System aus blauem Laser und strukturiertem Infrarotlicht. Er arbeitet mit sieben Laserlinien und erreicht eine hohe Messgenauigkeit. Durch die Kombination aus Laser- und Infrarottechnologie ist ein schnelles und detailliertes Scannen möglich. Der Scanner erfasst verschiedene Objektformate und kann auch schwarze oder metallische Oberflächen ohne zusätzliche Beschichtung scannen. Eine integrierte Stabilisierung minimiert Bewegungsunschärfe und sorgt für zuverlässige Ergebnisse in unterschiedlichen Umgebungen.
Genauigkeit bis zu 0,02 mm Scangröße 5-2000 mm











Mikroskopie
-
Messmikroskop Mahr MM 420
![]()
![]()
![]()
Werkstatt-Messmikroskop mit M3 Software und besonders großem Messraum. Die Messungen sind teilautomatisiert möglich.
Arbeitsraum 200x100x50 mm³ Vergrößerung 0,7x -4,5x Beleuchtung 4-Quadrantren + Durchlicht -
Zeiss Stereomikroskop 509
![]()
![]()
![]()
Stereomikroskop für optische Insektion von Bauteilen. Kameraaufbau über c-mount möglich.
Arbeitsraum/-abstand 195 x 160 mm² / 92 mm Vergrößerung bis 10x Beleuchtung 4-Quadranten -
Olympus BX53M
Das Lichtmikroskop der Firma Olympus wird zur Prüfung der erreichten Positionier- bzw. Montagegenauigkeit verschiedener Versuchsstände im sub-mikrometer-Bereich eingesetzt. Hierfür ist das Mikroskop mit einem motorisierten XY-Scanningtisch mit einem Verfahrbereich von 100 x 100 mm2 ausgestattet. Dieser kann mit einer Schrittweite von 0,01 µm und einer Genauigkeit von 3 µm (Wiederholgenauigkeit 1 µm) verfahren werden. In Kombination mit der motorisierten Z-Achse können sowohl 2- als auch 3-Dimensionale Bilder aufgenommen werden. Zur Verfügung stehen die Vergrößerungsstufen 2,5x, 5x, 20x, sowie 50x. In Verbindung mit der 9,1 Mpx-Kamera und unterschiedlichen Beleuchtungsstrategien können somit Bilder mit einer sub-mikrometer-Auflösung aufgenommen werden.
Arbeitsraum 100 x 100 mm2 Achsschrittweite 0,01 µm Achsgenauigkeit 3 µm Vergrößerungen 2,5x, 5x, 20x sowie 50x Auflösung < 1 µm






Versuchs- und Laboreinrichtungen
-
Klimaraum
![]()
![]()
![]()
Klimaraum für Arbeit in klimatisierter und sauberer Umgebung. Der Klimaraum beherbergt die Präzisionsmontagezelle, sowie verschiedene Arbeitsplätze mit Laboraufbauten für Präzisionsanwendungen, Messmikroskopen und weiterer Ausstattung für Versuche rund um Optikomntage und Klebeprozesse.
Grundfläche 5,6 m x 4,5 m Temperaturkonstanz ± 1,0 K Luftdurchsatz 1200 m³/h Arbeitsplätze mit ESD-Schutz 5 -
Aeordynamische Zuführanlage
![]()
![]()
![]()
Die aerodynamische Zuführanlage ermöglicht eine flexible, robuste und effiziente Zuführung von Kleinbauteilen für die automatisierte Montage. Unterschiedlich geformte rotationssymmetrische Bauteile können ohne konstruktive Anpassungen an der Anlage zugeführt werden. Durch die Nutzung von Luft anstelle mechanischer Schikanen zur Manipulation der Bauteile wird das Risiko von Verklemmungen reduziert, was eine hohe Zuführleistung bei gleichzeitig hoher technischer Verfügbarkeit ermöglicht.
-
Vakuumofen VO28
![]()
![]()
![]() ©
memmert.com
©
memmert.com
Vakuumschrank speziell für den Einsatz in der Soft Robotics geeeignet. Gleichzeitiges aushärten durch Temperaturen bis 200°C und entfernen von Lufteinschlüssen im flüssigen Silikon.
Temperaturbereich +20 bis +200°C Druckbereich 5 bis 1100 mbar -
Universalofen Memmert UF55
![]()
![]()
![]()
Universell einsetzbarer Wärme- und Trockenschrank für das thermische Aushärten von Klebstoffen sowie für Materialtests.
Temperaturbereich +20 bis +300°C Einstellgenauigkeit Temperatur bis 99.9 °C: 0.1 / ab 100 °C: 0.5 Innenraum Volumen 53 l -
Handschuhbox
![]()
![]()
![]()
Die modulare, erweiterbare Handschuhbox des Typs GS Mega 3/3 (GS Glovebox Systemtechnik) wird eingesetzt, um Proben unter Ausschluss von Sauerstoff zu produzieren und zu analysieren. Die Handschuhbox kann mit Argon geflutet und anschließend mit Silan dotiert werden, sodass ein Sauerstoffpartialdruck von weniger als 10-15 mbar erreicht werden kann. Dies ermöglicht ein Verarbeiten von oxidfreien Metalloberflächen.
Boxenmaße 160 cm x 120 cm x 90 cm Boxenvolumen 1,7 m³ Handschuhe 6 Leckrate <0,05 Vol%/h (ISO 10648-2, Klasse 1) GS-Vakuumschleuse d=400 mm, Edelstahl














Anlagen und Maschinen
-
Präzisionsmontageanlage
![]()
![]()
![]()
Zahlreiche Prozesse aus Forschung und Industriekooperationen wurden mit der Präzisionmontagezelle des match bereits umgesetzt. Der Präzisionsroboter mit einer hochgenauen integrierten Messtechnik ermöglicht schnelle und effiziente Montage, wobei das UV-Kleben als primäre Fügetechnik eingesetzt wird.
Technische Daten
Arbeitsraum 800 x 150 x 100 mm³ Wiederholgenauigkeit 0,52 μm @3σ Montagegenauigkeit 6,96 μm @3σ Kleinste Schrittweite 0,05 μm - Konfokales Lasermesssystem
- Cognex-Visionsystem
- Hochpräzisionsdrehachse
- 6-Achs-Kraft-Momentensensor
- Klebstoffdosiersystem
- UV-Aushärtung (LED und Breitband)
-
Planarmotor
![]()
![]()
![]()
Das Planarmotorsystem S3 von planarmotor. Das match hat 2 Flyways S3-A und mehreren XBots (Mover). Mit dem Planarmotor können die Bewegungseinheiten hochpräzise mit sechs Freiheiten bewegt werden. Die Bewegungseinheiten schweben dabei elektromagnetisch über dem Tisch.
Wiederholgenauigkeit <2 µm Traglast 0,6 – 2,4 kg Max. Geschwindigkeit 2 m/s Herstellerdaten unter www.planarmotor.com -
Keyence 3D-Drucker AGILISTA-3200W
![]()
![]()
![]()
Der Keyence AGILISTA-3200W arbeitet nach dem Prinzip des Tintenstrahldrucks und nutzt einen Druckkopf mit 256 Miniaturdüsen für höchste Präzision. Mit einer Schichthöhe von 15 µm verringert die Inkjet-Technologie die Verformung von Bauteilen, eine häufige Herausforderung beim herkömmlichen 3D-Druck. Da das Material während des Drucks nicht erwärmt wird, minimiert der AGILISTA die Verformungen und gewährleistet die Integrität des Endprodukts.
Die gedruckten Objekte sind aus hochauflösendem, transparentem Kunststoff gefertigt und weisen komplizierte Geometrien auf. Darüber hinaus kann der Drucker Materialien verarbeiten, die für Hochtemperaturanwendungen (<105°C) und unterschiedliche Härtegrade von Silikonkautschuk geeignet sind. Die Verwendung von wasserlöslichen Trägermaterialien ermöglicht die Herstellung komplexer Strukturen, die sich ohne chemische Hilfe mühelos entfernen lassen.Standard-Druckmaterial AR-M2
- Schichtdicke von 15 µm Auflösung
- Minimale Wandstärke: 0,2 mm
- Hohe Flexibilität bei geringen Wandstärken zur Realisierung von Schnappverbindungen
- Sehr stabile Bauteile durch hohe Festigkeit
- Schnelle Beurteilung von Baugruppen durch Transparenz
- Langlebigkeit und Maßhaltigkeit für den Vorrichtungs- und Lehrenbau
Hitzebeständiges Druckmaterial AR-H1
- Schichtdicke von 20 µm Auflösung
- Minimale Wandstärke: 0,8 mm
- Temperaturbeständigkeit bis zu 100 °C
Elastisches Silikondruckmaterial AR-G1L / AR-G1H
- Schichtdicke mit 30 µm Auflösung
- Minimale Wandstärke ab 0,5 mm (AR-G1L) / 0,3 mm (AR-G1H)
- Gedruckte Modelle mit der Haltbarkeit und den Eigenschaften von Silikon
- Sehr dünnwandige und elastische Modelle ermöglichen erste Design-Evaluierungen
- Dank des wasserlöslichen Trägermaterials brechen oder reißen die Modelle nicht
- Hitzebeständig wie normales Silikon bis zu 150 °C (AR-G1H) / 200 °C (AR-G1L)
-
Ultimaker S5 3D-Drucker
Der Ultimaker S5 ist ein Dual Extrusion FDM Drucker mit großen Bauraum von max. 33 x 24 x 30 cm. Eine umfassende Kompatibilität von mehr als 280 Materialien bietet eine Auswahl für die unterschiedlichsten Rapid Prototyping-Anforderungen.
-
MSLA-3D Drucker Elegoo Saturn S
![]()
![]()
![]()
Der Elegoo Saturn S ist ein 3D-Drucker, welcher Bauteile mittels selektiver Aushärtung aus Harz drucken kann. Durch das verwendete Druckverfahren lasen sich Bauteile mit sehr hoher Auslösung und hoher Geometriegenauigkeit drucken. Im Gegensatz zu klassischen SLA-Druckern besitzen mittels MSLA gefertigte Bauteile keine sichtbaren Sichten. Die Bauteile sind entsprechend in alle Richtungen gleich belastbar. Außerdem benötigen die Bauteile abgesehen von einer kurzen UV-Härtung keine weitere Nachbehandlung und können sofort verwendet werden
-
5G-Campusnetz
Mithilfe des ersten 5G-Campusnetzes der Leibniz Universität Hannover können wir drahtlose Kommunikation zwischen Maschinen und technischen Komponenten umsetzen.
- Antennen: 2
- Frequenzband: n78 (3.700 – 3.800 MHz)
-
Apple Vision Pro
![]()
![]()
![]()
Das Apple Vision Pro ist ein Spatial-Computing-Headset, das für Augmented-Reality- und Forschungsanwendungen entwickelt wurde. Es verfügt über ein hochauflösendes Micro-OLED-Display mit 23 Millionen Pixeln und unterstützt dynamische Bildwiederholraten für eine flüssige Darstellung.
Mit den Chips M2 und R1 verarbeitet es Sensordaten mit geringer Latenz und ermöglicht so Umgebungs-Tracking, Eye-Tracking und Handgestenerkennung in Echtzeit. Eine Reihe von Kameras, LiDAR und IMUs ermöglicht eine präzise räumliche Zuordnung und Interaktion.
Das Gerät unterstützt Wi-Fi 6 und Bluetooth 5.3. Zu den Eingabemethoden gehören Hände, Augen und Stimme, mit Kompatibilität für externe Peripheriegeräte, wodurch es für verschiedene Benutzer in der AR- und Robotikforschung anpassbar ist.


































